
Way back in the mists of time, I mentioned how we had laser scanners in the CVRG (one of which was mounted on Dagda for a while). We used the SICK for a long while, which is a block of steel that’s pretty adept at toe crushing, only scanned through a partial circle and was enormously expensive (and later we acquired a 3D scanner which was even more expensive but could at least do 360 degrees). That was fifteen years ago though.
Meet the modern version:

The YDLIDAR X4, evolved from roomba sensors and possibly a knockoff of a slightly more well-known sensor. Weighs next to nothing, costs $80, fits in the palm of your hand, scans through 360 degrees seven times a second taking 5000 samples in the process (so about half-degree resolution), ranges out to ten meters on a good day with a following wind.
Honestly, I think we’d have killed someone to get this back in the CVRG days.
Plug in, fire up the demo app (on linux, macos is unsupported, there is a windows sdk but I’m not that sick in the head yet)…
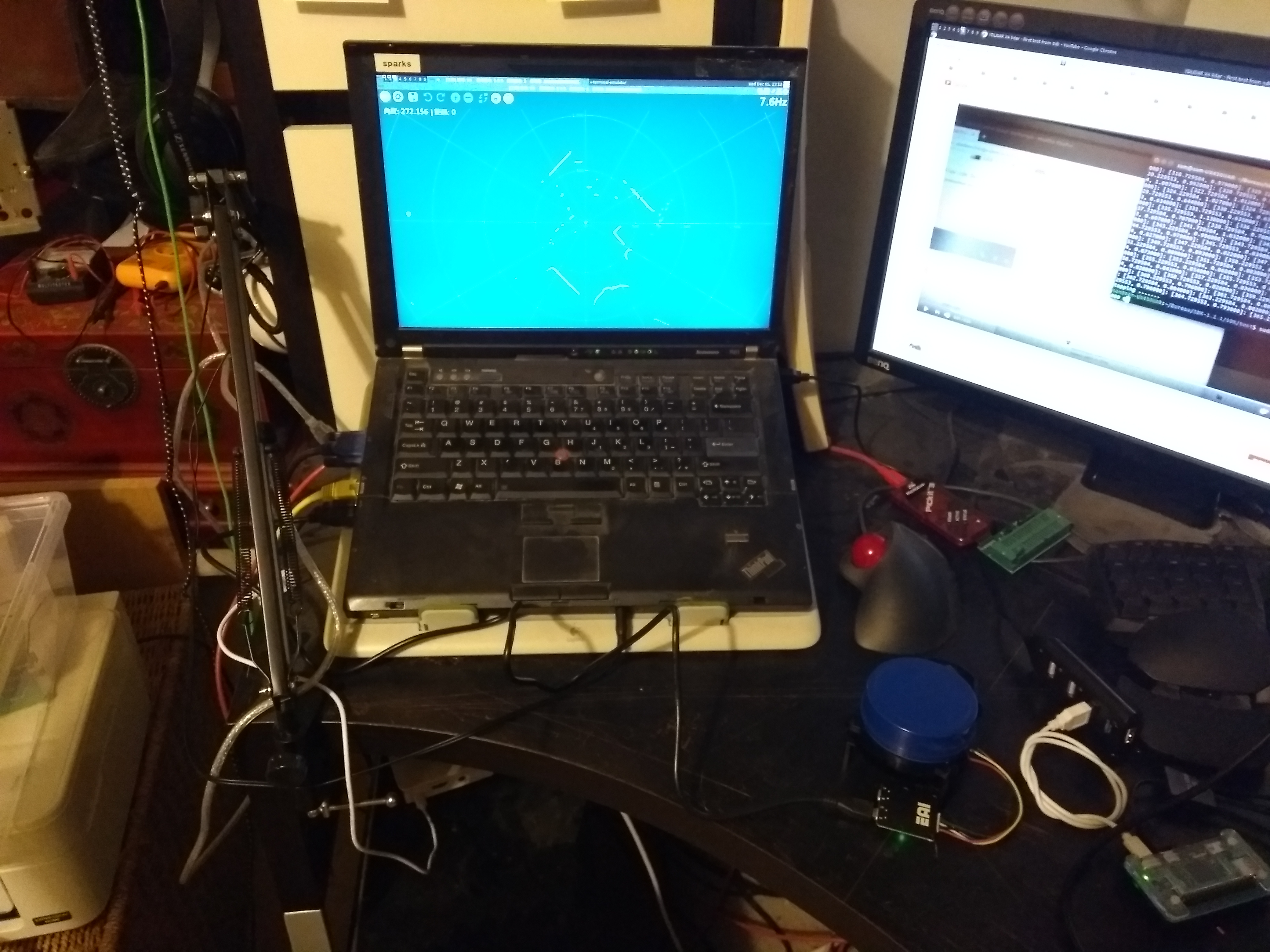
Remarkably trouble-free setup.
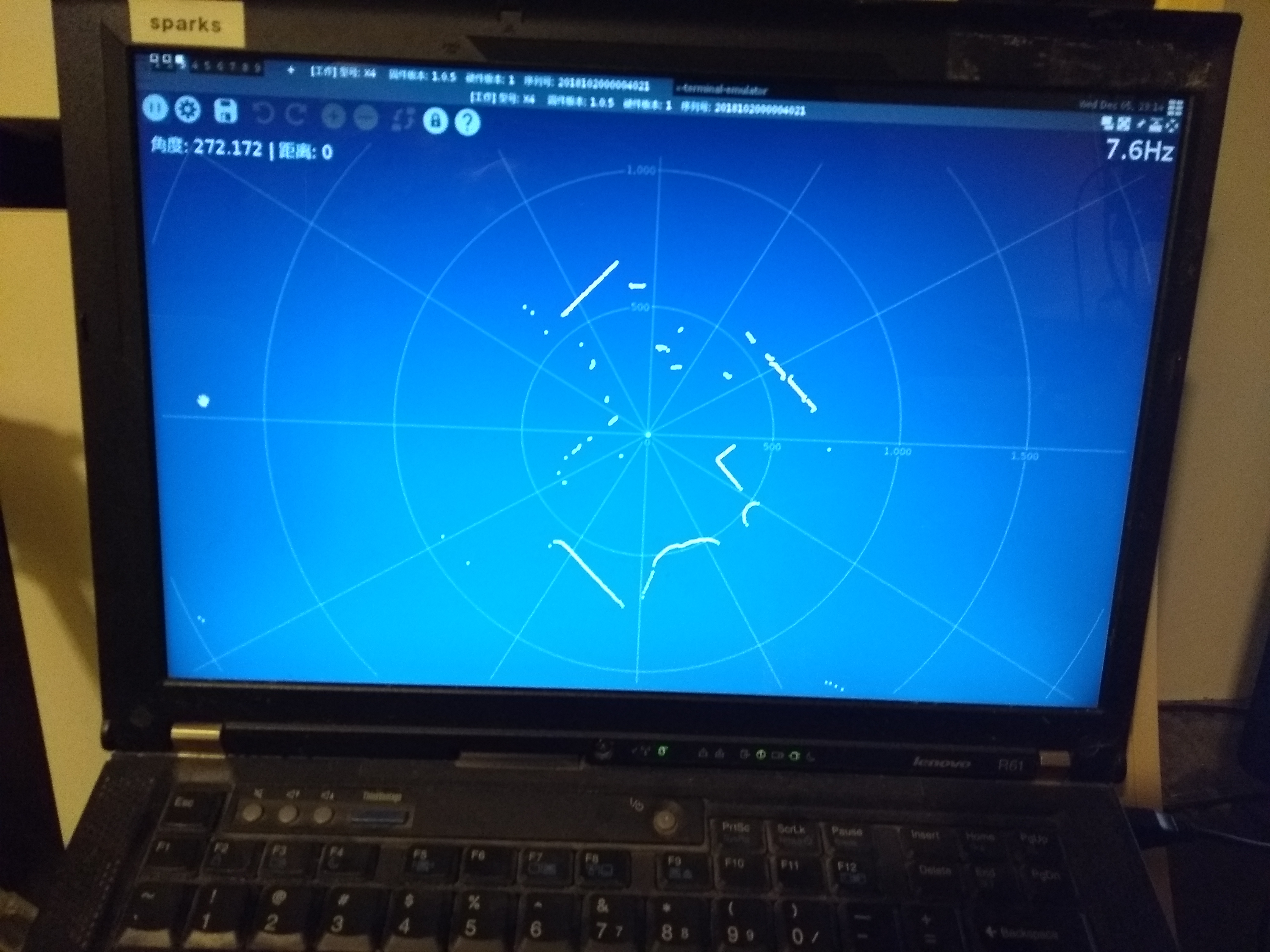
That curve at the bottom is me, the sharp angle at the 3-4 o’clock is the box the scanner came in, and you can see the back walls of the desk at 11 and 2 o’clock on the diagram.
There shall be more playing with this 😀
Looks interesting…I’ve just ordered one of these hoping they can deliver the project. https://www.kickstarter.com/projects/1697979147/lidar-for-everyone-hybo-ilidar?ref=nav_search&result=project&term=ilidar
It looks interesting, but I don’t think it’s true solid-state LIDAR. There were a few papers 20 years back about projecting a laser line into the field of view of a camera and watching for how the line was distorted from the expected arc by obstacles and using that distortion and the known estimate of the robot’s motion to “scan” the obstacle; but it wasn’t so much scanning as it was just computer vision with a specific form of lighting.
http://www.bupam.boun.edu.tr/cmpe699/Burak/d-computer-vision-using.pdf is the earliest work I know of on the idea, but it wasn’t really my field.
Based on the design they seem to be using in that kickstarter, with what looks like a laser line module in the base and a camera at the top, I’d guess they’re doing a structured light sensor, not solid state lidar (which even today I would expect to be a research project or horribly expensive).